Motion Control
So far, I've talked, written, blogged about the case/body for my 'droid'. Although it's going to be pretty cool to have a little K-9 running/rolling about, I really need to look at what I want him to do and how I'm going to do it.
So here's some thoughts and observations.
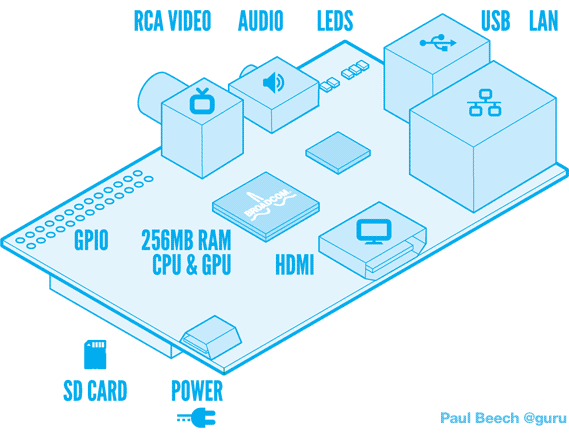
The Raspberry Pi is pretty much a fully functional PC. It's not a particularly powerful device, but that's by design, and it kind of adds to the whole DIY ethos I suppose. The full specs are here, but the main features are:-
Here's a nice diagram...

You'll see from the diagram that only real I/O for the device is via USB. You might recall from an earlier post that one of the reasons I'm doing this is to have K-9 move around, so I'm going to need to figure out how to connect his brain to his wheels. I've two solutions to explore:-
USB to Servo hardware. Hook a 3rd party device into one of the USB ports, something like this from pc-control.co.uk
Or, I can look in to the Gertboard, an 'expansion board' from one of the chaps behind the design of the RPi itself. This doens't use USB at all and connects directly to the RPi.
More reading and planning required I'm afraid....
So here's some thoughts and observations.
The Raspberry Pi is pretty much a fully functional PC. It's not a particularly powerful device, but that's by design, and it kind of adds to the whole DIY ethos I suppose. The full specs are here, but the main features are:-
- 700Mhz ARM Processor
- 256 Mb of Ram
- USB
- Ethernet
- Videocore 4 GPU supporting full HD with HDMI and RCA connector
Here's a nice diagram...
USB to Servo hardware. Hook a 3rd party device into one of the USB ports, something like this from pc-control.co.uk
Or, I can look in to the Gertboard, an 'expansion board' from one of the chaps behind the design of the RPi itself. This doens't use USB at all and connects directly to the RPi.
More reading and planning required I'm afraid....

Comments
Post a Comment